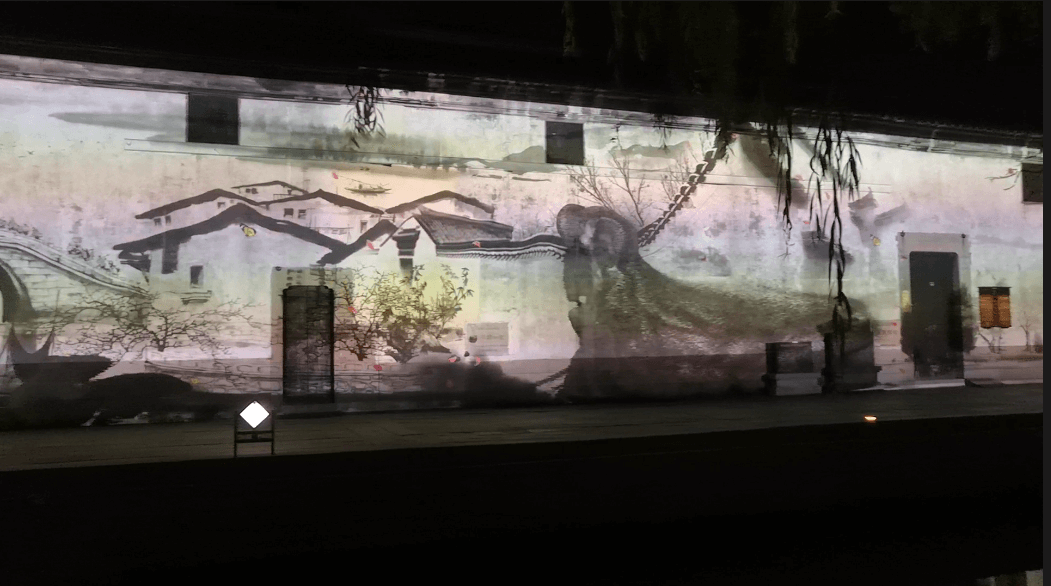
深度空间是一款功能强大的体感互动驱动软件,支持微软Azure Kinect和奥比中光Femto Bolt深度相机。
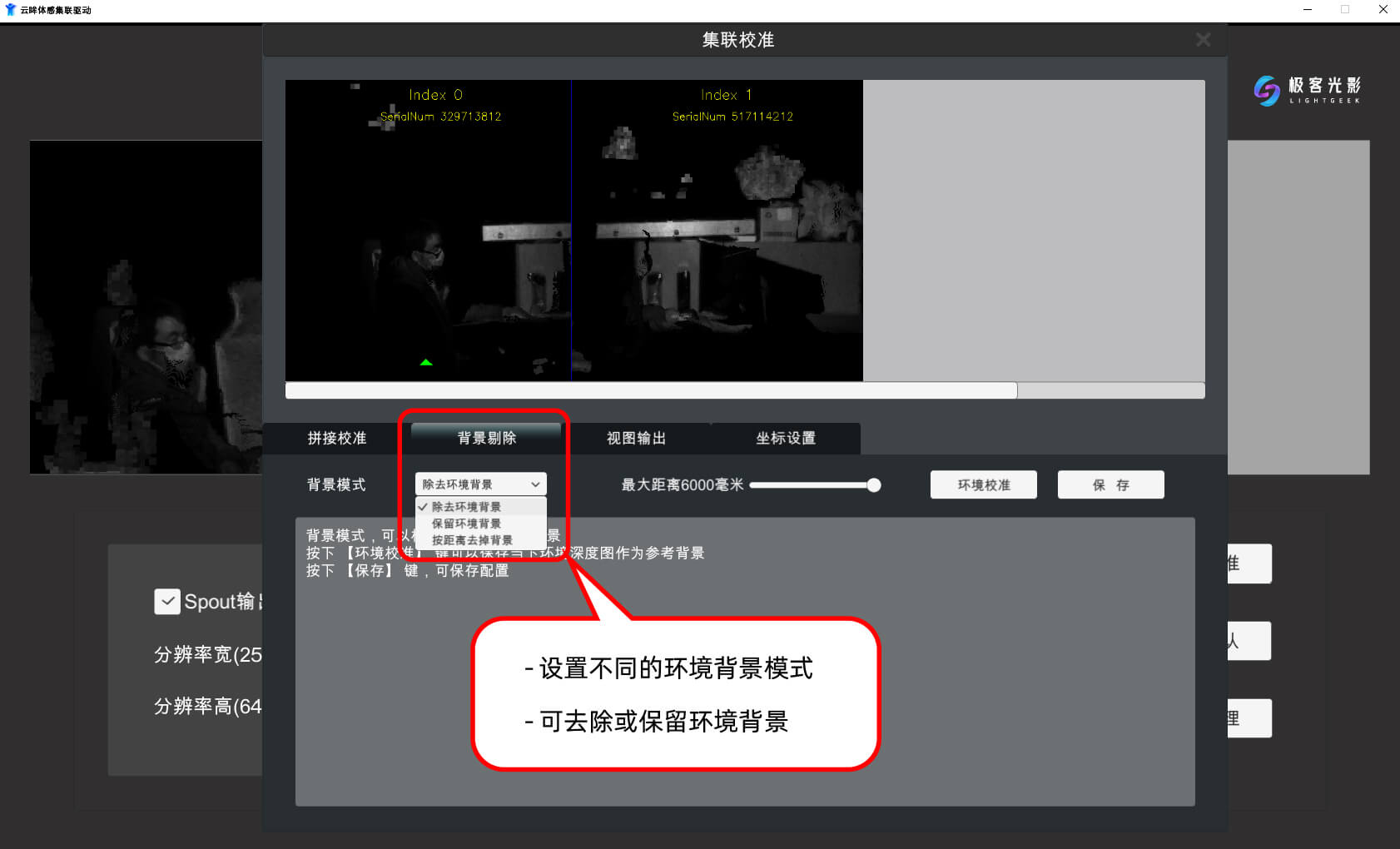
除支持常规单台TOF深度相机外,用户更可以通过深度空间软件进行多台TOF深度相机的3D空间拼接校准,获取大范围人体动态捕捉和骨骼空间拼接信息,以及多种形式的深度图像输出。
-
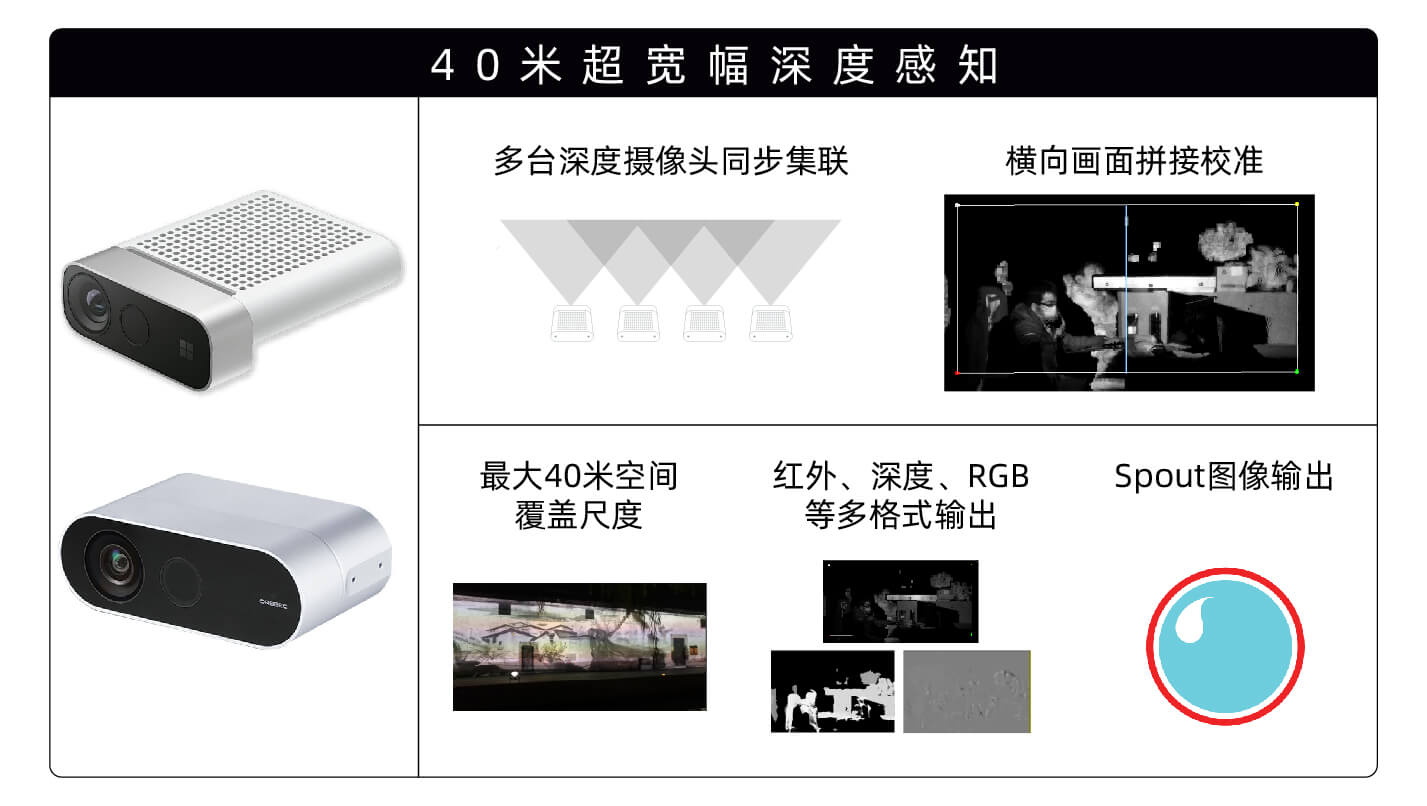
支持最多8台深度相机同步集联
-
支持多台深度相机的3D空间拼接校准,最大横向覆盖空间达40米
-
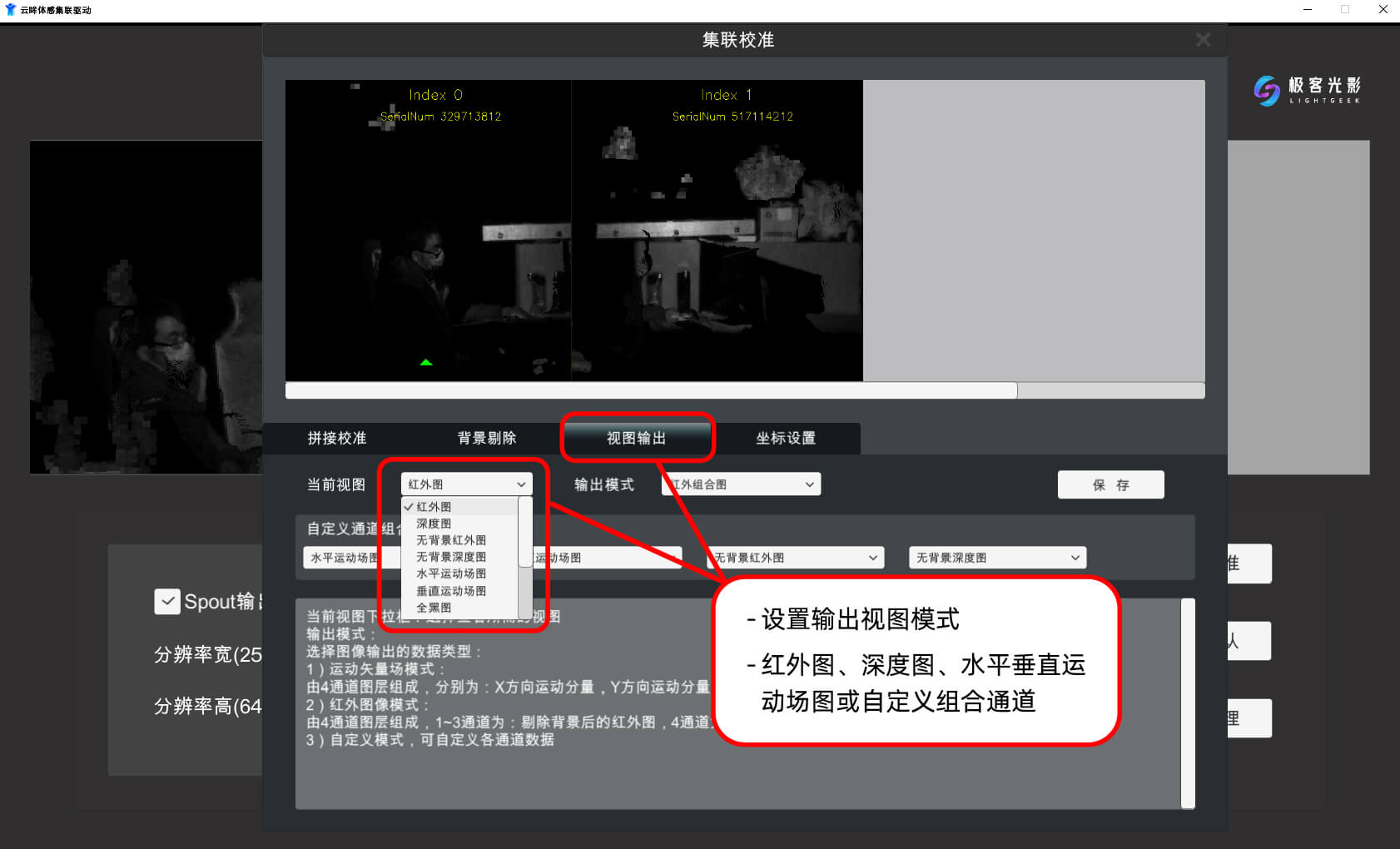
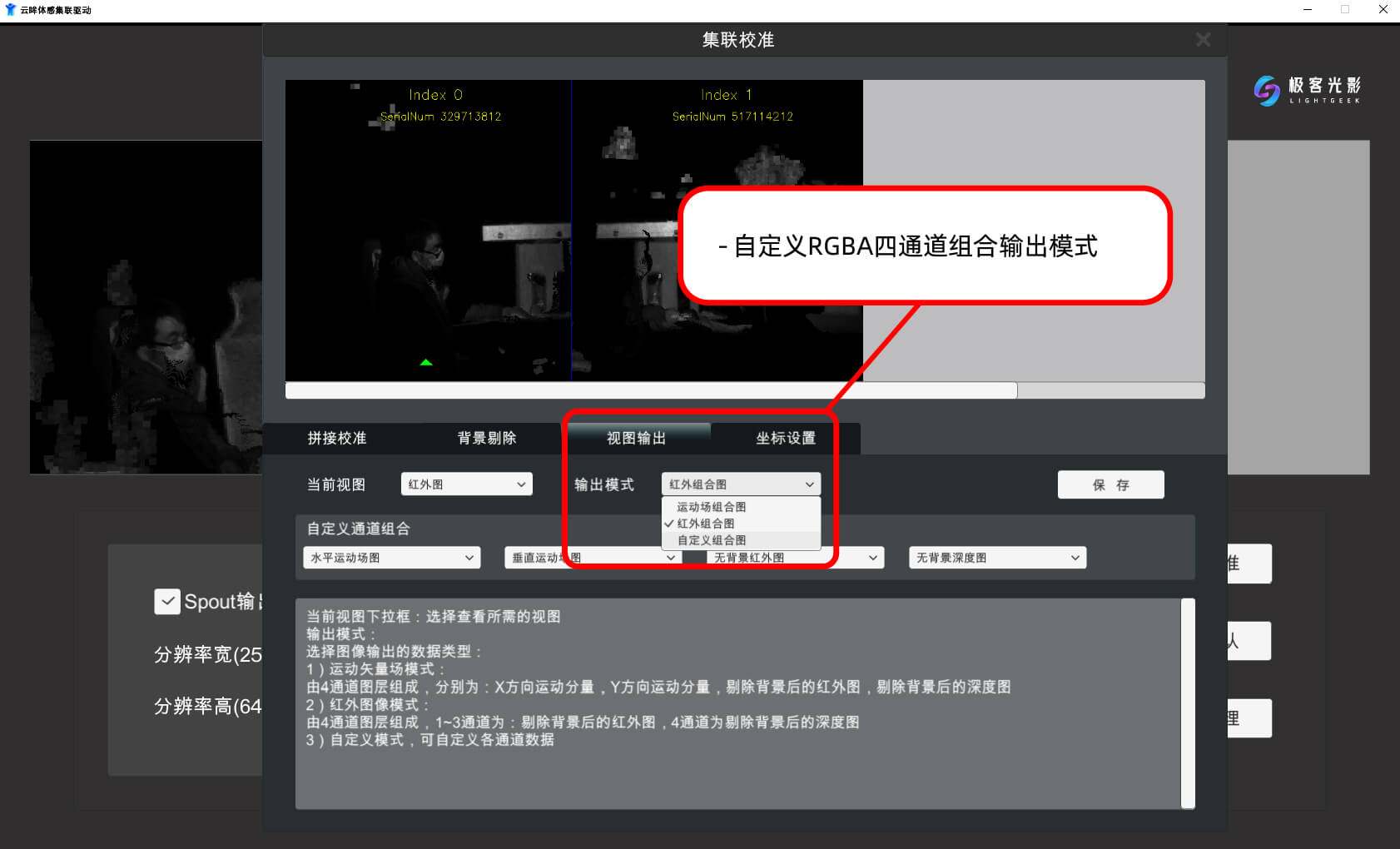
支持红外、深度、RGB、RGB转深度等多种格式图像输出
-
支持Spout图像输出到应用软件
-
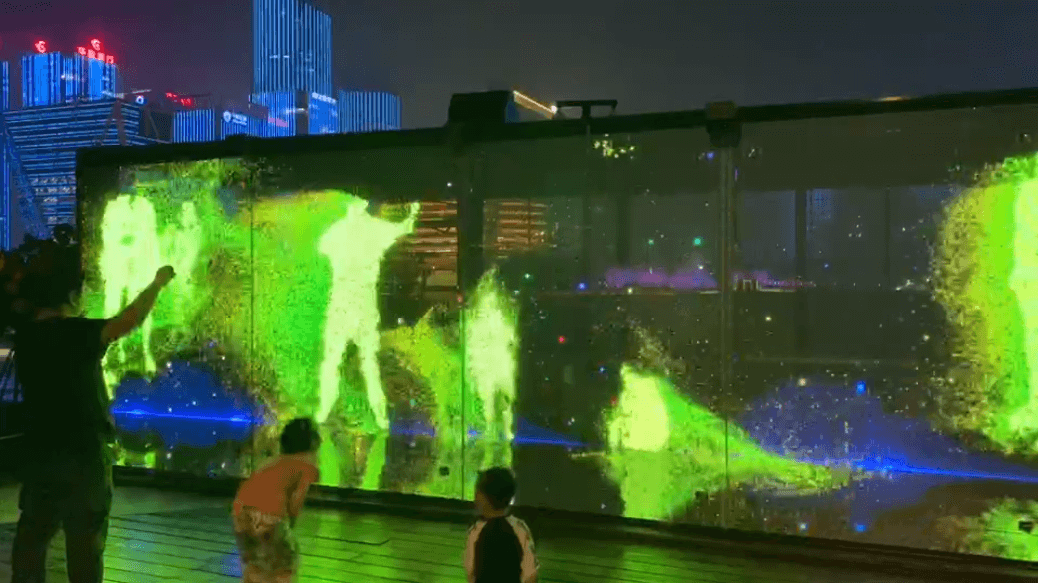
支持人体骨骼跨多台深度相机追踪
-
支持人体骨骼信息UDP输出